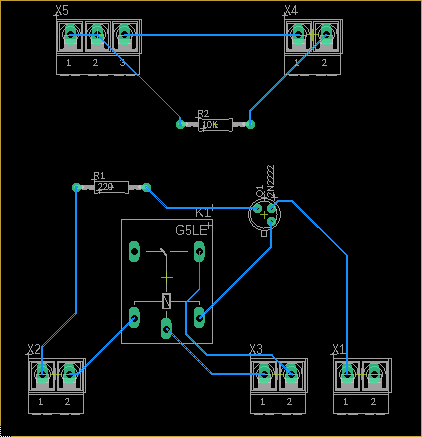
1) Finalizar
el diseño de la PCB para la práctica "Control de carga A.C.".

2) Consultar:
1. Qué es
la comunicación Serial (en informática o telecomunicaciones).
La
comunicación serie o comunicación secuencial, en telecomunicaciones e
informática, es el proceso de envío de datos de un bit a la vez, de forma
secuencial, sobre un canal de comunicación o un bus.
En
cambio, en la “comunicación en paralelo” todos los bits de cada símbolo se
envían al mismo tiempo, y por ello debe haber al menos tantas líneas de
comunicación como bits tenga la información a transmitir.
2. Características
de la comunicación Serial.
La
ventaja de la comunicación serie es que necesita un número más pequeño de
líneas de transmisión que una comunicación paralela que transmita la misma
información. Esta última necesita tantas líneas de transmisión como la cantidad
de bits que componen la información, mientras que la primera se puede llevar a
cabo con una sola línea de transmisión. Por otra parte, surgen una serie de
problemas en la transmisión de un gran número de bits en paralelo, como los
problemas de interferencia o desincronización.
3. Que
indica o que son los baudios.
La
velocidad en baudios es la velocidad a la que se transfiere la información en
un canal de comunicación. En el contexto del puerto serie, "9600
baudios" significa que el puerto serie es capaz de transferir un máximo de
9600 bits por segundo. Si la unidad de información es de una velocidad (un
bit), la velocidad de bits y la velocidad en baudios son idénticas. Si una
baudio se da como 10 pedacitos, (por ejemplo, ocho pedacitos de datos más dos
pedacitos que enmarcan), la tarifa de pedacito sigue siendo 9600 pero la
velocidad de baudio es 9600/10, o 960. Siempre configura BaudRate como bits por
segundo. Por lo tanto, en el ejemplo anterior, establezca BaudRate en 9600.
4. Explicar
la función Serial.begin(rate).
Establece
la velocidad de datos en bits por segundo (baudios) para la transmisión de
datos en serie. Para comunicarse con la computadora, use una de estas tasas:
300, 600, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600 o 115200.
Sin embargo, puede especificar otras tarifas, por ejemplo, para comuníquese a
través de los pines 0 y 1 con un componente que requiere una velocidad de
transmisión particular.
Un
segundo argumento opcional configura los datos, la paridad y los bits de
parada. El valor predeterminado es 8 bits de datos, sin paridad, un bit de
parada.
5. Explicar
la función Serial.println(data).
El
método println() escribe datos en el puerto serial. Es usualmente útil para
observar los datos producidos en el programa o para imprimir datos en otros
dispositivos conectados al el puerto serial. El método println funciona como
print, pero envía un carácter new line por cada vez que es llamada la función.
Los datos pueden ser un int, float, byte, long, char, char[], String o números
en base decimal (DEC), hexadecimal (HEX) , octal (OCT), o binario (BIN).
6. Explicar
la función Serial.avaible().
Esta
función devuelve el número de bytes (caracteres u octetos) que se encuentran
disponibles en el stream para su lectura. Esta función forma parte de la clase
“Stream” y es llamada por cualquier clase que herede de “Stream” (como por
ejemplo las clases “Wire” y “Serial” que veremos más tarde)
7. Explicar
la función Serial.Read().
En el
lenguaje Arduino Serial Read es una función que permite leer (recibir) bytes
mediante un puerto Serial. La función puede funcionar asíncronamente. Una de
las características principales del puerto serial de Arduino, es que sólo puede
enviar o recibir un byte por transmisión. Entonces para poder usar a la función
Serial.read() se requiere indicar, de preferencia, cuantos bytes son los que se
quieren leer. Esto es, utilizar a la función Serial.available() en conjunto con
Arduino Serial Read para hacer la lectura de los bytes seriales.


Comentarios
Publicar un comentario